Bounding Boxes, Segmentations and Object Coordinates: How Important is Recognition for 3D Scene Flow Estimation in Autonomous Driving Scenarios?
2017
Conference Paper
avg
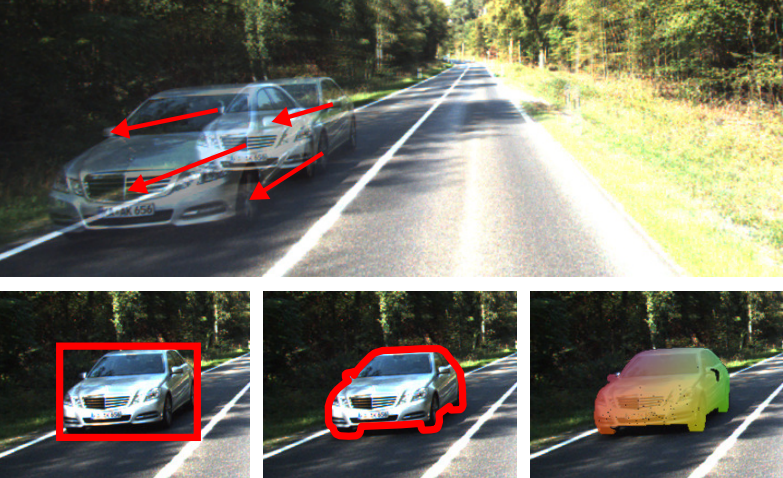
Existing methods for 3D scene flow estimation often fail in the presence of large displacement or local ambiguities, e.g., at texture-less or reflective surfaces. However, these challenges are omnipresent in dynamic road scenes, which is the focus of this work. Our main contribution is to overcome these 3D motion estimation problems by exploiting recognition. In particular, we investigate the importance of recognition granularity, from coarse 2D bounding box estimates over 2D instance segmentations to fine-grained 3D object part predictions. We compute these cues using CNNs trained on a newly annotated dataset of stereo images and integrate them into a CRF-based model for robust 3D scene flow estimation - an approach we term Instance Scene Flow. We analyze the importance of each recognition cue in an ablation study and observe that the instance segmentation cue is by far strongest, in our setting. We demonstrate the effectiveness of our method on the challenging KITTI 2015 scene flow benchmark where we achieve state-of-the-art performance at the time of submission.
| Author(s): | Aseem Behl and Omid Hosseini Jafari and Siva Karthik Mustikovela and Hassan Abu Alhaija and Carsten Rother and Andreas Geiger |
| Book Title: | Proceedings IEEE International Conference on Computer Vision (ICCV) |
| Year: | 2017 |
| Month: | October |
| Day: | 22-29 |
| Publisher: | IEEE |
| Department(s): | Autonomous Vision |
| Research Project(s): |
Object Scene Flow
|
| Bibtex Type: | Conference Paper (inproceedings) |
| Event Name: | IEEE International Conference on Computer Vision (ICCV) |
| Event Place: | Venice, Italy |
| Address: | Piscataway, NJ, USA |
| ISBN: | 978-1-5386-1032-9 |
| ISSN: | 2380-7504 |
| Links: |
pdf
suppmat Poster |
|
BibTex @inproceedings{Behl2017ICCV,
title = {Bounding Boxes, Segmentations and Object Coordinates: How Important is Recognition for 3D Scene Flow Estimation in Autonomous Driving Scenarios?},
author = {Behl, Aseem and Jafari, Omid Hosseini and Mustikovela, Siva Karthik and Alhaija, Hassan Abu and Rother, Carsten and Geiger, Andreas},
booktitle = {Proceedings IEEE International Conference on Computer Vision (ICCV)},
publisher = {IEEE},
address = {Piscataway, NJ, USA},
month = oct,
year = {2017},
doi = {},
month_numeric = {10}
}
|
|