Learning Non-volumetric Depth Fusion using Successive Reprojections
2019
Conference Paper
avg
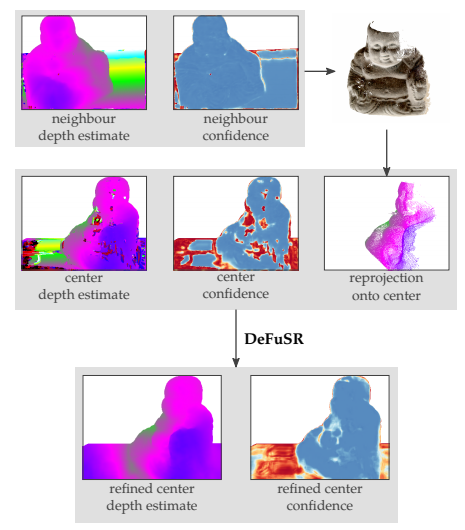
Given a set of input views, multi-view stereopsis techniques estimate depth maps to represent the 3D reconstruction of the scene; these are fused into a single, consistent, reconstruction -- most often a point cloud. In this work we propose to learn an auto-regressive depth refinement directly from data. While deep learning has improved the accuracy and speed of depth estimation significantly, learned MVS techniques remain limited to the planesweeping paradigm. We refine a set of input depth maps by successively reprojecting information from neighbouring views to leverage multi-view constraints. Compared to learning-based volumetric fusion techniques, an image-based representation allows significantly more detailed reconstructions; compared to traditional point-based techniques, our method learns noise suppression and surface completion in a data-driven fashion. Due to the limited availability of high-quality reconstruction datasets with ground truth, we introduce two novel synthetic datasets to (pre-)train our network. Our approach is able to improve both the output depth maps and the reconstructed point cloud, for both learned and traditional depth estimation front-ends, on both synthetic and real data.
| Author(s): | Simon Donne and Andreas Geiger |
| Book Title: | Proceedings IEEE Conf. on Computer Vision and Pattern Recognition (CVPR) |
| Year: | 2019 |
| Month: | June |
| Department(s): | Autonomous Vision |
| Bibtex Type: | Conference Paper (inproceedings) |
| Event Name: | IEEE International Conference on Computer Vision and Pattern Recognition (CVPR) 2019 |
| Event Place: | Long Beach, USA |
| Links: |
pdf
suppmat Project Page Video Poster blog |
| Video: | |
|
BibTex @inproceedings{Donne2019CVPR,
title = {Learning Non-volumetric Depth Fusion using Successive Reprojections },
author = {Donne, Simon and Geiger, Andreas},
booktitle = {Proceedings IEEE Conf. on Computer Vision and Pattern Recognition (CVPR)},
month = jun,
year = {2019},
doi = {},
month_numeric = {6}
}
|
|