Learning Cascaded Detection Tasks with Weakly-Supervised Domain Adaptation
2021
Conference Paper
avg
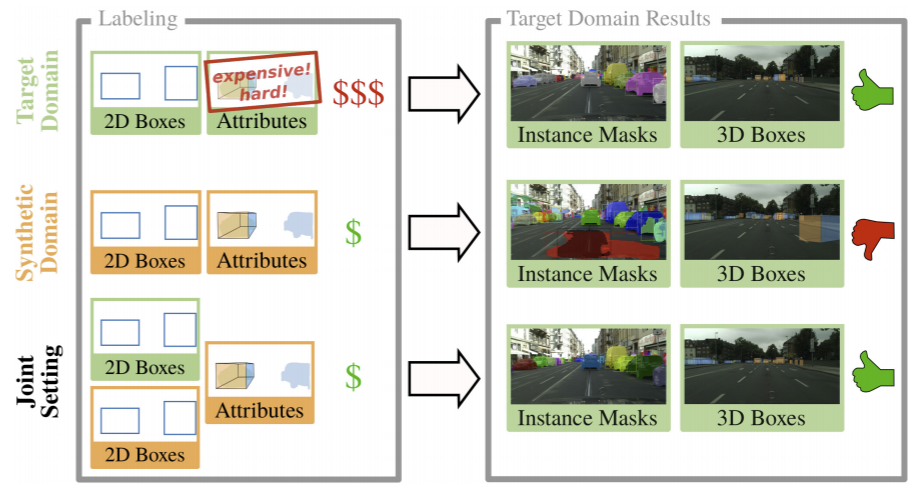
n order to handle the challenges of autonomous driving, deep learning has proven to be crucial in tackling increasingly complex tasks, such as 3D detection or instance segmentation. State-of-the-art approaches for image-based detection tasks tackle this complexity by operating in a cascaded fashion: they first extract a 2D bounding box based on which additional attributes, e.g. instance masks, are inferred. While these methods perform well, a key challenge remains the lack of accurate and cheap annotations for the growing variety of tasks. Synthetic data presents a promising solution but, despite the effort in domain adaptation research, the gap between synthetic and real data remains an open problem. In this work, we propose a weakly supervised domain adaptation setting which exploits the structure of cascaded detection tasks. In particular, we learn to infer the attributes solely from the source domain while leveraging 2D bounding boxes as weak labels in both domains to explain the domain shift. We further encourage domain-invariant features through class-wise feature alignment using ground-truth class information, which is not available in the unsupervised setting. As our experiments demonstrate, the approach is competitive with fully supervised settings while outperforming unsupervised adaptation approaches by a large margin.
| Author(s): | Niklas Hanselmann and Nick Schneider and Benedikt Ortelt and Andreas Geiger |
| Book Title: | 2021 IEEE Intelligent Vehicles Symposium (IV) |
| Year: | 2021 |
| Department(s): | Autonomous Vision |
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| DOI: | 10.1109/IV48863.2021.9575397 |
| Event Name: | 4th IEEE Intelligent Vehicles Symposium (IV 2021) |
| Event Place: | Nagoya, Japan |
| State: | Published |
| Links: |
Paper
Video Project page |
| Video: | |
|
BibTex @inproceedings{Hanselmann2021IV,
title = {Learning Cascaded Detection Tasks with Weakly-Supervised Domain Adaptation},
author = {Hanselmann, Niklas and Schneider, Nick and Ortelt, Benedikt and Geiger, Andreas},
booktitle = {2021 IEEE Intelligent Vehicles Symposium (IV)},
year = {2021},
doi = {10.1109/IV48863.2021.9575397}
}
|
|