OctNetFusion: Learning Depth Fusion from Data
2017
Conference Paper
avg
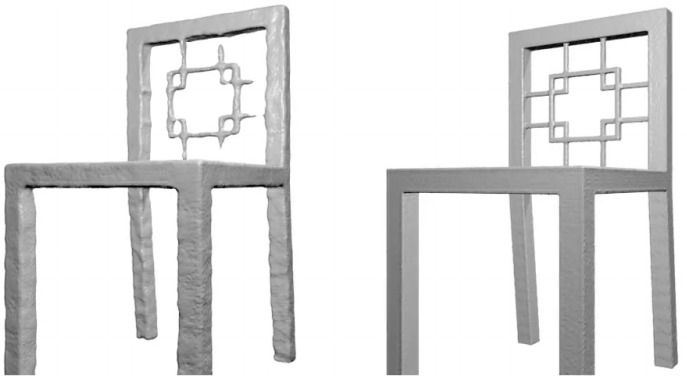
In this paper, we present a learning based approach to depth fusion, i.e., dense 3D reconstruction from multiple depth images. The most common approach to depth fusion is based on averaging truncated signed distance functions, which was originally proposed by Curless and Levoy in 1996. While this method is simple and provides great results, it is not able to reconstruct (partially) occluded surfaces and requires a large number frames to filter out sensor noise and outliers. Motivated by the availability of large 3D model repositories and recent advances in deep learning, we present a novel 3D CNN architecture that learns to predict an implicit surface representation from the input depth maps. Our learning based method significantly outperforms the traditional volumetric fusion approach in terms of noise reduction and outlier suppression. By learning the structure of real world 3D objects and scenes, our approach is further able to reconstruct occluded regions and to fill in gaps in the reconstruction. We demonstrate that our learning based approach outperforms both vanilla TSDF fusion as well as TV-L1 fusion on the task of volumetric fusion. Further, we demonstrate state-of-the-art 3D shape completion results.
| Author(s): | Gernot Riegler and Ali Osman Ulusoy and Horst Bischof and Andreas Geiger |
| Book Title: | International Conference on 3D Vision (3DV) 2017 |
| Year: | 2017 |
| Month: | October |
| Department(s): | Autonomous Vision |
| Research Project(s): |
Efficient volumetric inference with OctNet
|
| Bibtex Type: | Conference Paper (conference) |
| Paper Type: | Conference |
| Event Name: | International Conference on 3D Vision (3DV) 2017 |
| Event Place: | Qingdao, China |
| Links: |
pdf
Video 1 Video 2 Project Page |
| Video: | |
| Video: | |
|
BibTex @conference{Riegler2017THREEDV,
title = {OctNetFusion: Learning Depth Fusion from Data},
author = {Riegler, Gernot and Ulusoy, Ali Osman and Bischof, Horst and Geiger, Andreas},
booktitle = {International Conference on 3D Vision (3DV) 2017},
month = oct,
year = {2017},
doi = {},
month_numeric = {10}
}
|
|