Andreas Geiger (Project Leader),
Thomas Schöps
(Department of Computer Science, ETH Zurich),
Jonas Uhrig
(Daimler R&D Sindelfingen)
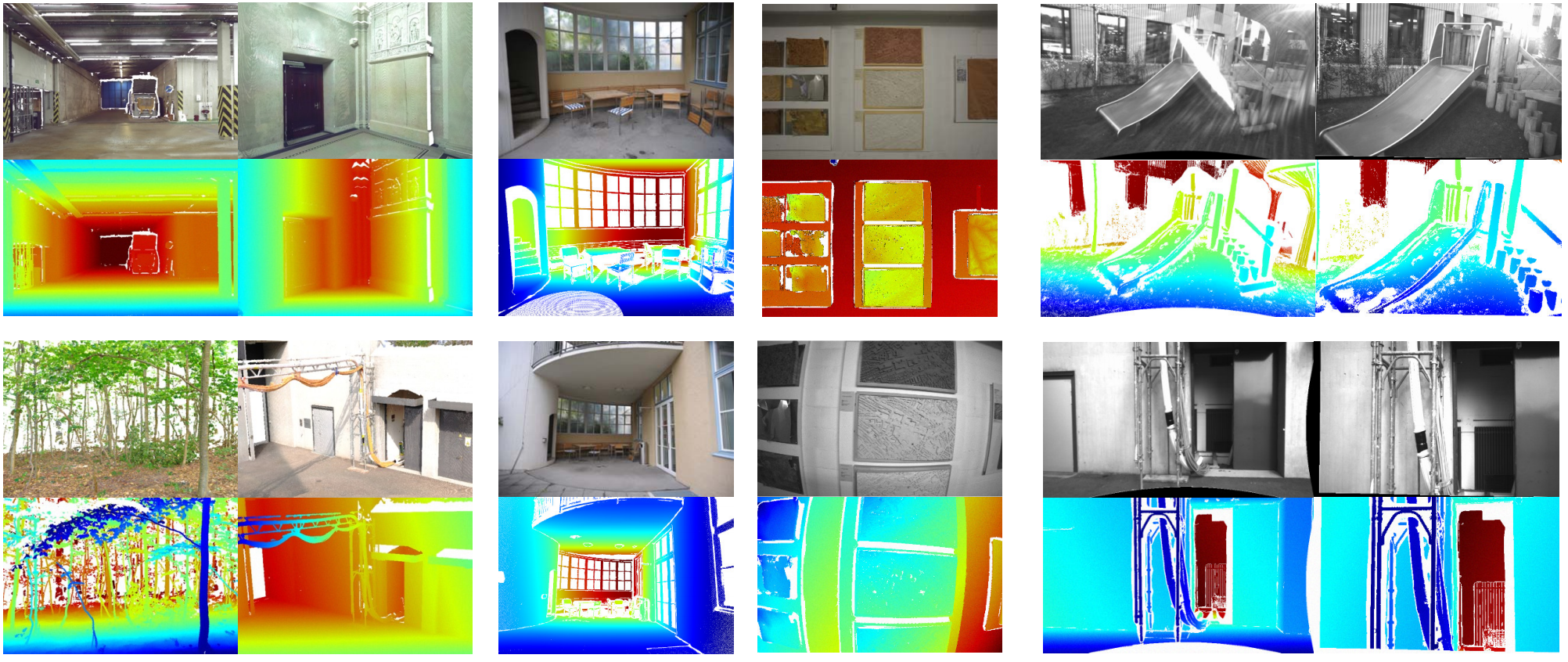
Access to 3D datasets and benchmarks is crucial for driving progress in the field. Beyond our popular KITTI dataset, we have therefore proposed novel large-scale datasets for single-image depth prediction and depth map completion [ ], as well as two-view and multi-view 3D reconstruction in indoor and outdoor environments [ ] (ETH3D).