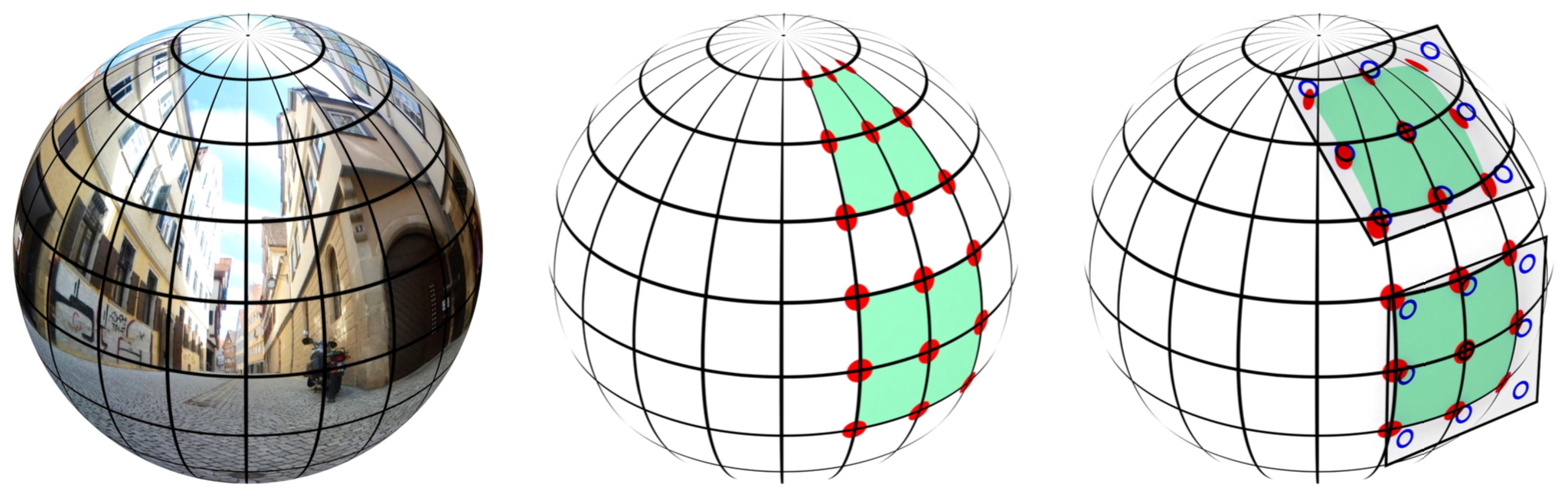
360° Image (left), regular convolution kernel (middle), SphereNet kernel (right).
Omnidirectional cameras offer great benefits over classical cameras wherever a wide field of view is essential, such as in virtual reality applications or in autonomous robots. Unfortunately, standard convolutional neural networks are not well suited for this scenario as the natural projection surface is a sphere which cannot be unwrapped to a plane without introducing significant distortions, particularly in the polar regions. In this work, we present SphereNet, a novel deep learning framework which encodes invariance against such distortions explicitly into convolutional neural networks. Towards this goal, SphereNet adapts the sampling locations of the convolutional filters, effectively reversing distortions, and wraps the filters around the sphere. By building on regular convolutions, SphereNet enables the transfer of existing perspective convolutional neural network models to the omnidirectional case. We demonstrate the effectiveness of our method on the tasks of image classification and object detection, exploiting two newly created semi-synthetic and real-world omnidirectional datasets.